Autor:
Laura McKinney
Erstelldatum:
10 Lang L: none (month-011) 2021
Aktualisierungsdatum:
7 Kann 2024

Inhalt
- Stufen
- Teil 1 Den Roboter zusammenbauen
- Teil 2 Verbindungen herstellen
- Teil 3 Schließen Sie die Stromversorgung an
- Teil 4 Installieren Sie das Arduino-Programm
- Teil 5 Programmieren des Roboters
Möchten Sie lernen, wie Sie Ihren eigenen Roboter bauen? Es gibt viele verschiedene Arten von Robotern, die Sie selbst herstellen können. Die meisten Menschen möchten, dass ihre Aufgaben einfach ausgeführt werden, z. B. von Punkt A nach Punkt B. Sie können eine mit ähnlichen Komponenten erstellen oder von vorne beginnen. Es ist eine großartige Aktivität, die Grundlagen der Elektronik und Programmierung zu erlernen.
Stufen
Teil 1 Den Roboter zusammenbauen
-

Holen Sie sich das Material. Um einen einfachen Roboter zu bauen, benötigen Sie mehrere einfache Elemente. Sie finden die meisten dieser Artikel in einem elektronischen Geschäft und auf vielen Websites im Internet. Einige Basis-Kits sollten sie auch anbieten. Der Roboter, den Sie bauen werden, muss nicht gelötet werden. Folgendes benötigen Sie:- 1 Arduino Uno (oder eine andere Art von Mikrocontroller)
- 2 kontinuierlich rotierende Servomotoren
- 2 Räder für Servos
- 1 Freilauf
- 1 kleines Steckbrett mit einer positiven und einer negativen Linie auf jeder Seite
- 1 Distanzmelder (mit vierpoligem Stecker)
- 1 kleiner Schalter mit einem Widerstand von 10 kΩ
- abbrechbare Stecker
- 1 Etui für 6 x AA-Batterien mit einem Stecker von 9 Your DC
- Verbindungskabel
- starkes doppelseitiges Klebeband oder Heißkleber
-
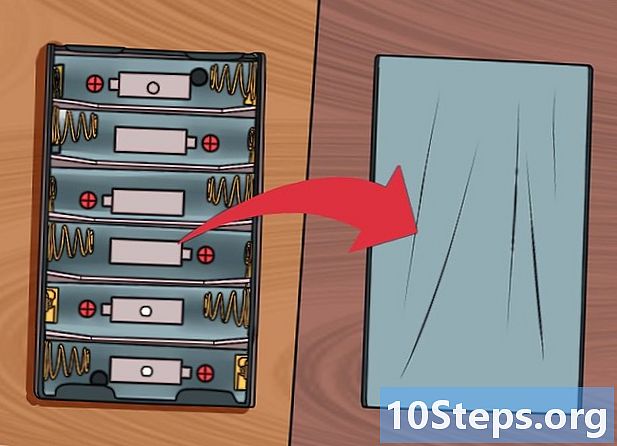
Klappen Sie das Batteriefach um, um die Rückseite freizulegen. Sie werden den Koffer als Basis für den Bau des Roboters verwenden. -
Richten Sie die beiden Servos aus. Richten Sie die beiden Servomotoren am Ende des Gehäuses aus. Dies muss das Ende der Stromkabel sein. Die Servos sollten den Boden berühren, und die Drehmechanismen sollten jeweils zur Außenseite des Gehäuses gerichtet sein. Es ist wichtig, die Servos so auszurichten, dass die Räder gerade sind. Die Servokabel müssen an der Innenseite des Gehäuses herausragen. -

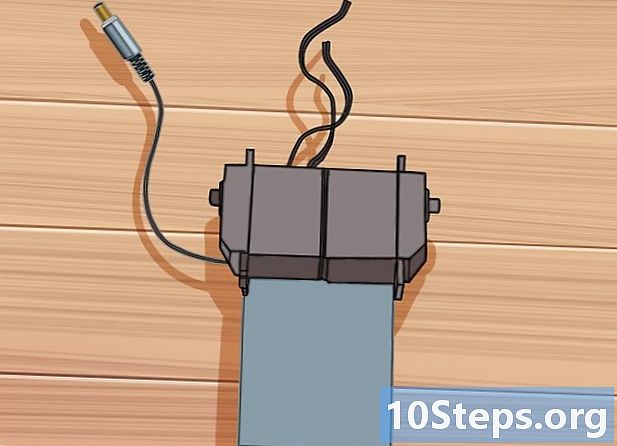
Sichern Sie die Servos. Halten Sie die Servos mit Klebeband oder Klebstoff fest. Sie müssen überprüfen, ob sie fest mit dem Koffer verbunden sind. Die Rückseite der Motoren muss perfekt zur Gehäuserückseite ausgerichtet sein.- Sie sollten jetzt die Hälfte der Rückseite des Batteriefachs einnehmen.
-
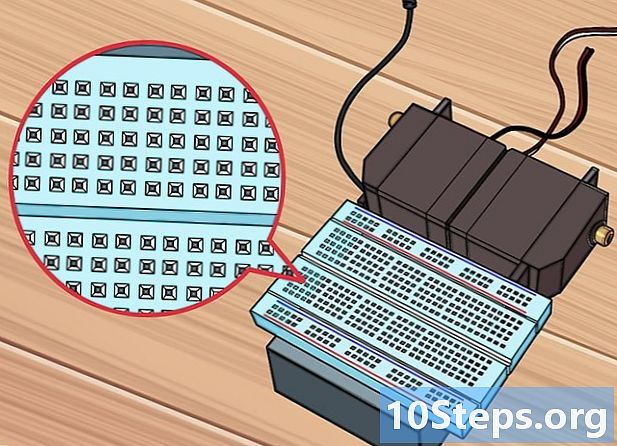
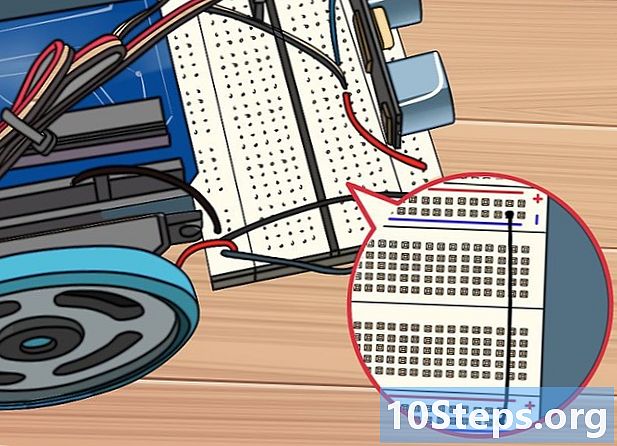
Bringen Sie die Testplatte an. Kleben Sie die Testplatte senkrecht zum Gehäuse. Es sollte etwas über die Vorderseite des Gehäuses und auf beiden Seiten hinausragen. Stellen Sie sicher, dass Sie es sichern, bevor Sie fortfahren. Die Reihe A sollte den Servos am nächsten sein. -

Befestigen Sie den Arduino. Befestigen Sie den Arduino-Mikrocontroller oben an den Motoren. Wenn Sie sie reparieren lassen, sollte sich oben ein flacher Bereich befinden, an dem sie sich berühren. Kleben Sie die Arduino-Platte so darauf, dass der USB-Anschluss und der Netzstecker in entgegengesetzter Richtung zur Testplatte zeigen. Die Arduino-Wäsche sollte auf der Testplatte nur leicht hervorstehen. -

Die Räder einbauen. Drücken Sie die Räder fest an, um sie am Drehmechanismus des Motors zu befestigen. Dies kann etwas Kraft erfordern, da die Räder so eng wie möglich an der Achse sind, um die bestmögliche Traktion zu erzielen. -

Befestigen Sie den Freilauf am Boden der Platte. Wenn Sie das Chassis umdrehen, sollten Sie sehen, dass ein Teil der Testplatte aus dem Batteriefach herausragt. Befestigen Sie den Freilauf ggf. mit Unterlegscheiben, um die Höhe des Rades einzustellen. Dieser Freilauf wird das Vorderrad und ermöglicht dem Roboter, sich in jede Richtung zu drehen.- Wenn Sie einen Bausatz gekauft haben, wurde der Freilauf möglicherweise mit Unterlegscheiben geliefert, mit denen Sie sicherstellen können, dass er den Boden berührt.
Teil 2 Verbindungen herstellen
-

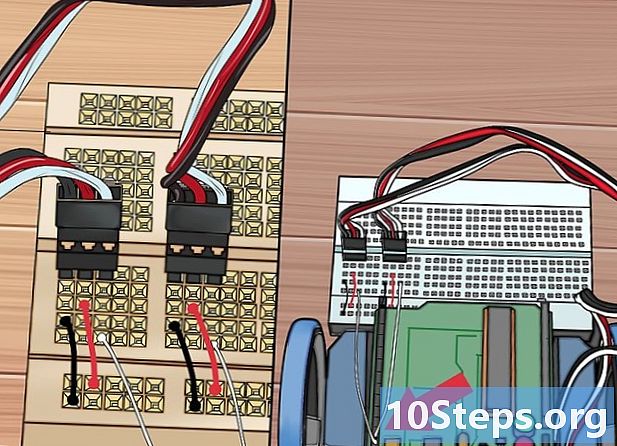
Ziehen Sie zwei dreipolige Stecker ab. Sie werden es verwenden, um die Servomotoren an die Testplatte anzuschließen. Drücken Sie die Karten so aus dem Kunststoffteil, dass sie auf beiden Seiten gleich groß sind. -

Installieren Sie die beiden Anschlüsse. Stecken Sie die beiden Stecker in die Steckplätze 1-3 und 6-8 der Reihe E auf der Platte. Stellen Sie sicher, dass Sie sie gut haben. -

Verbinden Sie die Servokabel mit den Anschlüssen. Wenn Sie dies tun, schließen Sie das schwarze Kabel an der linken Seite an (Stecker 1 und 6). Dadurch können die Servos an die Testplatte angeschlossen werden. Stellen Sie sicher, dass das linke Servo an den linken Anschluss und das rechte Servo an den rechten Anschluss angeschlossen ist. -

Schließen Sie die roten Kabel an. Verbinden Sie die roten Drähte der Stecker C2 und C7 mit der roten (positiven) Leitung der Testplatte. Achten Sie darauf, die rote Reihe auf der Rückseite der Platte zu verwenden (diejenige, die dem Rest des Rahmens am nächsten kommt). -

Schließen Sie die schwarzen Kabel an. Schließen Sie die schwarzen Drähte der B1- und B6-Stecker an die blaue (negative) Leitung der Testplatte an. Stellen Sie sicher, dass Sie die blaue Reihe auf der Rückseite der Platte verwenden. Verbinden Sie sie nicht mit der roten Reihe. -
Schließen Sie die weißen Kabel an. Verbinden Sie die weißen Verbindungskabel der Stecker 12 und 13 mit den Steckern Arduino A3 und A8. Dadurch kann der Mikrocontroller die Servos steuern und die Räder drehen. -

Befestigen Sie den Detektor an der Vorderseite der Platte. Sie sollten es nicht in der Reihe installieren, die mit dem Teststreifenstrom verbunden ist, sondern in der ersten Reihe von Steckern mit dem Buchstaben J. Stellen Sie sicher, dass Sie es in der Mitte mit der gleichen Anzahl von Steckern auf jeder Seite platzieren. -

Schließen Sie das schwarze Verbindungskabel an. Schließen Sie das schwarze Verbindungskabel vom I14-Stecker an den ersten verfügbaren Stecker in der blauen Reihe links am Detektor an. Dieser ist mit dem Boden verbunden. -

Schließen Sie das rote Verbindungskabel an. Schließen Sie das rote Verbindungskabel vom I17-Stecker an den ersten verfügbaren Stecker in der roten Reihe auf der rechten Seite des Detektors an. Dieser wird den Detektor speisen. -

Stecken Sie das weiße Verbindungskabel ein. Schließen Sie ein weißes Verbindungskabel vom I15-Stecker an den Arduino 9-Stecker und ein weiteres weißes Kabel vom I16-Stecker an den 8-Stecker an, damit die Informationen an den Mikrocontroller übertragen werden können.
Teil 3 Schließen Sie die Stromversorgung an
-

Drehen Sie den Roboter, um die Seite mit den Batterien zu sehen. Richten Sie es so aus, dass die Kabel des Gehäuses unten links herausragen. -

Schließen Sie das rote Kabel an. Verbinden Sie das rote Kabel mit der zweiten Feder links unten. Sie müssen absolut sicher sein, dass der Fall richtig ausgerichtet ist. -

Schließen Sie das schwarze Kabel an. Schließen Sie das schwarze Kabel an die letzte Feder unten rechts an. Diese beiden Kabel helfen Ihnen dabei, die richtige Spannung an den Arduino anzulegen. -

Verbinden Sie die roten und schwarzen Kabel. Verbinden Sie die roten und schwarzen Kabel mit den Stiften ganz rechts auf der Rückseite der Testplatte. Das schwarze Kabel muss an die blaue Leitung an Stecker 30 angeschlossen werden. Das rote Kabel muss an die rote Leitung an Stecker 30 angeschlossen werden. -

Verbinden Sie ein schwarzes Kabel mit dem Boden. Installieren Sie ein schwarzes Kabel zwischen dem Erdungsstecker (GND) von Arduino und der blauen Reihe auf der Rückseite. Verbinden Sie es mit Stecker 28 auf der Platte. -
Installieren Sie ein weiteres schwarzes Kabel. Schließen Sie ein schwarzes Kabel an die blaue Reihe auf der Rückseite an Pin 29 der blauen Reihe auf der Vorderseite an. Schließen Sie die roten Reihen nicht an, da dies den Mikrocontroller beschädigen kann. -

Installieren Sie ein rotes Kabel. Verbinden Sie einen roten Draht zwischen der roten Reihe in den 30er Jahren und den 5V auf dem Arduino. Dadurch wird der Mikrocontroller mit Strom versorgt. -
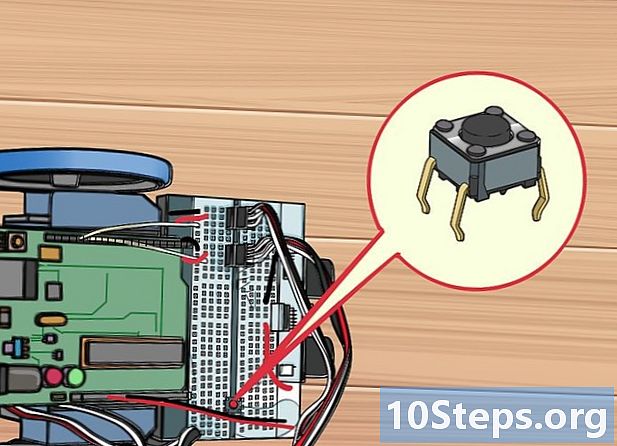
Installieren Sie die Schaltfläche. Installieren Sie den Knopf in dem Raum zwischen den Reihen an den Stiften 24-26. Mit dem Schalter können Sie den Roboter ein- und ausschalten, ohne die Stromversorgung ausschalten zu müssen. -

Schließen Sie ein neues rotes Kabel an. Schließen Sie ein rotes Kabel zwischen Stecker H24 und der roten Reihe im nächsten verfügbaren Stecker rechts am Detektor an. Dies wird den Knopf füttern. -

Verwenden Sie einen Widerstand, um H26 mit der blauen Reihe zu verbinden. Schließen Sie es direkt an den Stecker neben dem schwarzen Kabel an, das Sie oben angeschlossen haben. -
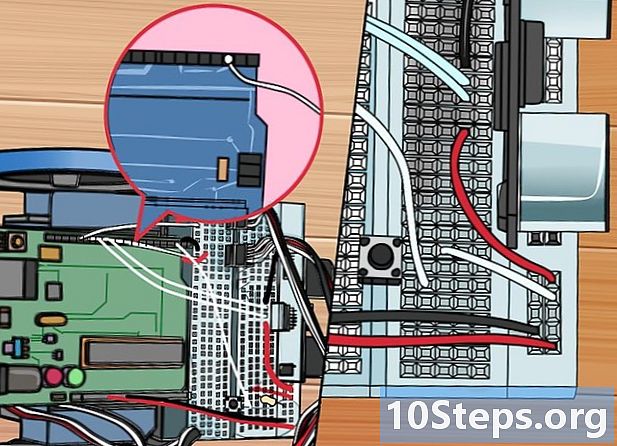
Schließen Sie ein weißes Kabel zwischen dem G26 und dem Arduino-Stecker 2 an. Dadurch kann der Arduino den Status der Taste erkennen.
Teil 4 Installieren Sie das Arduino-Programm
-

Laden Sie die IDE herunter und installieren Sie sie. LIDE ist die Arduino-Entwicklungsumgebung und ermöglicht es Ihnen, die Anweisungen zu programmieren, bevor Sie sie an die Platte senden. Sie können es kostenlos herunterladen arduino.cc/en/main/software. Dekomprimieren Sie larchive, indem Sie darauf doppelklicken, und verschieben Sie den Ordner in eine Ecke, an die Sie sich leicht erinnern können. Sie werden das Programm nicht wirklich installieren, Sie starten es einfach aus dem extrahierten Ordner, indem Sie auf klicken arduino.exe. -

Verbinden Sie den Batteriekasten mit dem Arduino. Verbinden Sie die Buchse mit der Buchse auf der Arduino-Platine, um sie mit Strom zu versorgen. -
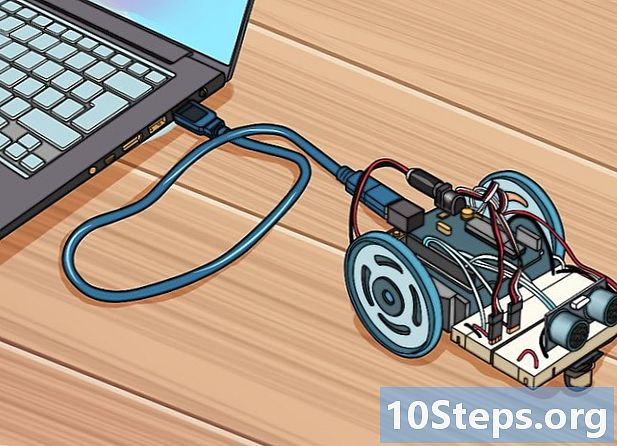
Verbinden Sie den Arduino mit Ihrem Computer. Schließen Sie die Platte mit einem USB-Kabel an Ihren Computer an. Windows wird es wahrscheinlich nicht erkennen. -

Drücken Sie ⊞ Gewinnen+R und Typ devmgmt.msc. Dadurch wird das Verwaltungsprogramm gestartet. -

Setzen Sie die Installation fort. Rechtsklick auf Unbekanntes Gerät in dem Teil Andere Geräte und wähle "Aktualisieren Sie den TreiberWenn Sie diese Option nicht sehen, klicken Sie auf EigenschaftenKlicken Sie auf die Registerkarte Pilotund dann auswählen Aktualisieren Sie den Treiber. -

wählen "Einen Treiber auf dem Computer auswählen'. Auf diese Weise können Sie den Treiber auswählen, der mit der Arduino IDE bereitgestellt wurde. -

Klicken Sie auf navigate und suchen Sie nach dem Ordner. Sie finden die benötigten Treiber in dem Ordner, den Sie zuvor extrahiert haben. -

Wählen Sie die Treiber aus und klicken Sie auf „OK'. Wenn Sie wegen des unbekannten Programms eine Warnung erhalten, bestätigen Sie, dass Sie fortfahren möchten.
Teil 5 Programmieren des Roboters
-

Starten Sie die IDE. Starten Sie die Arduino IDE, indem Sie auf die Datei doppelklicken arduino.exe im Ordner der IDE. Dies öffnet eine leere Seite für ein neues Projekt. -

Fügen Sie den Code ein, um den Roboter geradeaus zu bewegen. Der obige Code bewegt den Roboter kontinuierlich vorwärts.# include
// dies fügt die "servo" Bibliothek zum Programm hinzu // dies erzeugt zwei Objekte für beide Servo leftMotor Servos; Servo rechtsMotor; void setup ()


